足回り
ロボットの移動に関しては、上位のレイヤからは移動量と移動速度だけしか見えなくするので、2足歩行でもキャタピラでもなんでも良いのですが、部品の入手性、動作の安定性などを考慮してこのような形にしました。床面から少し距離を置くことで、多少でこぼこした場所でも床をこすらずスムーズに移動できます。
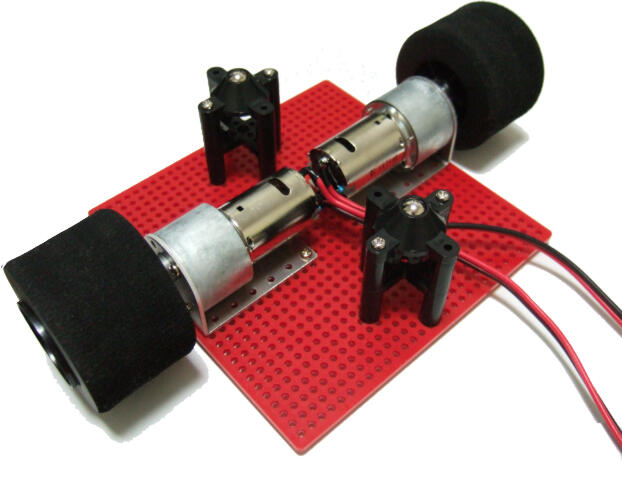
(床面側から撮影)
使用部品は以下の通り。
 ユニバーサルプレート RDP-801 (赤いプレート) (ツクモロボット王国)
ユニバーサルプレート RDP-801 (赤いプレート) (ツクモロボット王国)
ユニバーサルキャスター RDP-806 (ツクモロボット王国)
ギヤードモーター380K75&64mmスポンジタイヤ(2セット) (ツクモロボット王国)
モータで駆動する車輪が2個あるとき、キャスター等を利用してロボットを支えることで超信地旋回(車輪をお互いに逆方向に動かし、その場で向きを変えること)のような動作が取れるようになります。そこで、自律ロボットでは家具用のキャスターやカグスベール( ニチアス株式会社)を利用することが多いのですが、今回利用したキャスターはロボット専用ということもあり家具用のものと比べて良い動きをします。スペーサーが数種類ついているのもよいです。
ニチアス株式会社)を利用することが多いのですが、今回利用したキャスターはロボット専用ということもあり家具用のものと比べて良い動きをします。スペーサーが数種類ついているのもよいです。
(床面側から撮影)
使用部品は以下の通り。
モータで駆動する車輪が2個あるとき、キャスター等を利用してロボットを支えることで超信地旋回(車輪をお互いに逆方向に動かし、その場で向きを変えること)のような動作が取れるようになります。そこで、自律ロボットでは家具用のキャスターやカグスベール(

TOP PAGE △