Bluetooth RS232 シリアルアダプター AKC121
0. 用意するもの
(ハードウェア)
- SPP (Serial Port Profile)対応のBluetoothモジュール (Bluetooth v1.2以上に対応したもの)
- USB-シリアル変換ケーブル
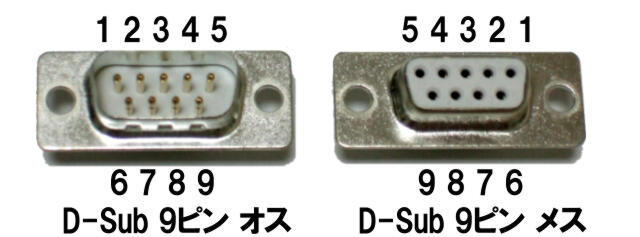
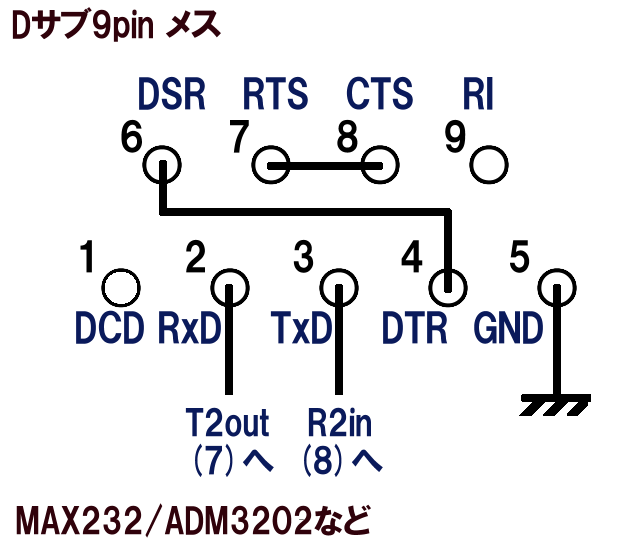
- D-sub 9 pin シリアルクロスケーブル
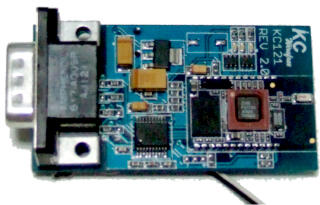
- AKC121
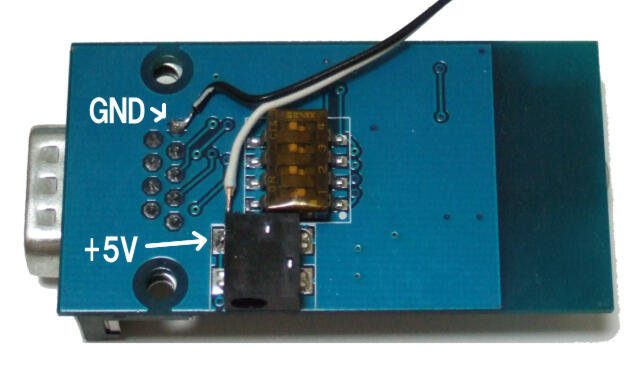
- 5V電源
基板に直接電源を供給する例
(ソフトウェア)
- UTF-8 TeraTerm Pro with TTSSH2 (
COM1~4だけではなく、COM99までをサポート
1. 接続準備
(準備中)
2. 接続確認
AKC121 側から以下のKCコマンドを実行する。AKC121のデフォルトの通信設定は、115200 bps, N81, ハードウェアフロー, 改行コード=CR であるので、TeraTerm等の設定をあらかじめ行っておくこと。
AT+ZV EnableBond (PC側のID12桁) (任意のパスワード)
AT+ZV SPPConnect (PC側のID番号12桁)
AT+ZV SPPConnect (PC側のID番号12桁)
例: ID 000a94021234 のデバイスに対して、PINをhogehogeに設定
AT+ZV EnableBond 000a94021234 hogehoge
AT+ZV SPPConnect 000a94021234
AT+ZV SPPConnect 000a94021234
ここまで入力すると Windows側でデバイスが発見されパスワード(デバイスキー)を求められるので、上記で設定したパスワードを入力する。これ以降は通常のシリアル通信と同様に動作する。
3. 自動接続
任意のシリアルケーブル接続デバイスと接続する場合、接続デバイス側でATコマンドを発行することができないことが普通である。AKC121をあらかじめPCに直接接続してSmartCableSetupモードに設定しておくことでこの問題を解決できる。
AT+ZV SmartCableSetup (PC側のID12桁) (自動接続リトライ数: 0~999) (リトライ間隔: 1~1000x100 ms)
例: 接続が切れた場合、3秒間隔で100回自動リトライする。
AT+ZV SmartCableSetup 000a94021234 100 30
この指定を無効にする場合は、接続が切れた状態で以下のコマンドを実行する。
AT+ZV DeleteSmartCable
4. 通信速度の変更
以下のコマンドで通信速度が変更可能である。これは電源を切っても値が保持される。一時的に変更したい場合には ChangeBaud コマンドを利用する。
AT+ZV ChangeDefaultBaud (通信速度/bps)
なお、設定可能な通信速度は、9600, 19200, 38400, 57600, 115200 (出荷時), 230400, 460800, 921600 bps である。
例: デフォルトの通信速度を 38400 bps に設定する。
AT+ZV ChangeDefaultBaud 38400

RS-232C

この記事のトラックバックURL
http://tmp.junkbox.info/tb.php/8
新着トラックバック
げん玉とは日本最大級のポイントサイトの1つであり、通常のポイントカードと同じようにサイト内で特定のアクション(広告のクリックもしや案件の利用)をすることにより、ポイン...
| WebMoney(ウェブマネー)を稼ぐ方法 | 10/03/30 21:36 |
社会人なので
ゴールデンウィークは9連休にしてロボット製作の方向で。

今手に入る部品 その4
■ アーガイルホームテック
ロボットとPCの間はBluetoothで接続します。時間があれば、いしかわきょーすけさんの成果を利用させていただこうと考えていましたが、今回は断念。
- BlueToothRS232シリアルアダプター AKC121
より安価な3.3V系のものもありますが、今回はこちらで。PC側はUSB接続の適当なものを利用します。
ロボットとPCの間はBluetoothで接続します。時間があれば、いしかわきょーすけさんの成果を利用させていただこうと考えていましたが、今回は断念。
- BlueToothRS232シリアルアダプター AKC121
より安価な3.3V系のものもありますが、今回はこちらで。PC側はUSB接続の適当なものを利用します。

今手に入る部品 その3
ここからは通販で。
■ メカロボショップ
ここでは30A程度まで流せるモータドライバが手に入ります。マイコンチップとの親和性も良いです。
- 低電圧対応デュアルシリアルモータコントローラ
モータ2個を各5Aまで駆動できます。PWM周波数が600Hz なので、「レ」と「レ#」の間の音がします。たぶん。
■ メカロボショップ
ここでは30A程度まで流せるモータドライバが手に入ります。マイコンチップとの親和性も良いです。
- 低電圧対応デュアルシリアルモータコントローラ
モータ2個を各5Aまで駆動できます。PWM周波数が600Hz なので、「レ」と「レ#」の間の音がします。たぶん。

今手に入る部品 その2
■ 千石電商
- 浅草ギ研3軸加速度センサー
このサイズと価格帯は魅力的なので購入。ロボットの挙動プログラミング用デバイスとして利用予定。
- 3軸加速度センサモジュール KXM52-1050
秋月電子の新商品です。800円とお買い得です。近々調べてみます。(2006/5/22 追記)
- 電池ボックス
千石は電池ボックスが充実しているのでここで選んで購入。ただモーター駆動にはNi-MH電池より鉛蓄電池のほうが良い気がしてます。
- PSD (GP2D12)
定番。ロボマガ館より微妙に安いです。
■ 秋月電子
- H8/3069F USBホストボードキット
USBホストがほしいよね。というわけで購入。
- 浅草ギ研3軸加速度センサー
このサイズと価格帯は魅力的なので購入。ロボットの挙動プログラミング用デバイスとして利用予定。
- 3軸加速度センサモジュール KXM52-1050
秋月電子の新商品です。800円とお買い得です。近々調べてみます。(2006/5/22 追記)
- 電池ボックス
千石は電池ボックスが充実しているのでここで選んで購入。ただモーター駆動にはNi-MH電池より鉛蓄電池のほうが良い気がしてます。
- PSD (GP2D12)
定番。ロボマガ館より微妙に安いです。
■ 秋月電子
- H8/3069F USBホストボードキット
USBホストがほしいよね。というわけで購入。

今手に入る部品
ディアゴスティーニの週刊マイロボット付録の組み立てロボットは音声認識、画像認識、BluetoothによるPCとの通信機能など、自律ロボットを作る上でほしいと思う機能がそろっています。今回のロボットは、これをベースにつくることで工数を削減できると思ったものの、残念ながら必要な部品がそろうのは1年以上先のこと。そこで秋葉原で最近入手可能になった部品を物色してきました。
■ ツクモロボット王国
- TAMIYA ギヤードモーター380K75&64mmスポンジタイヤ(2セット)
「競技用ロボットの製作に最適な駆動ユニットとタイヤのセットです」という売り文句につられて購入。1mの移動に1.35秒かかる(7.2V駆動時)というスピードもなかなかお手軽です。
- JAPAN ROBOTECHのパーツ
ガワに手間をかけたくない人向けです。大型のユニバーサルプレート、L字型のユニバーサルプレート、ユニバーサルピラー、ユニバーサルキャスターをそれぞれ購入しました。
つづく。
■ ツクモロボット王国
- TAMIYA ギヤードモーター380K75&64mmスポンジタイヤ(2セット)
「競技用ロボットの製作に最適な駆動ユニットとタイヤのセットです」という売り文句につられて購入。1mの移動に1.35秒かかる(7.2V駆動時)というスピードもなかなかお手軽です。
- JAPAN ROBOTECHのパーツ
ガワに手間をかけたくない人向けです。大型のユニバーサルプレート、L字型のユニバーサルプレート、ユニバーサルピラー、ユニバーサルキャスターをそれぞれ購入しました。
つづく。

今年の知能ロボコン@仙台は参加の方向で
いろいろと一段落したので、このあたりでロボット製作に復帰しようとおもいます。以前からささおのことをご存知の方は生暖かく見守ってください。そうでない方もよろしくお願いします。
さて、今年の知能ロボコン参加ロボットですが、
ガワ
ガワ(外見)の部分はいたって標準的に作りこみます。目新しいものは盛り込まず、確実に動き、故障時の対応が容易になることを最重要課題とします。モータについては7.2VのDCモータを利用します。
回路
回路部分は、5年前に作ったまじょこさんの技術をベースにモジュール化を推し進めていきます。
ソフトウェア
ソフトウェア部分が今回の一番の目玉です。ベースとなる部分はアセンブラやCやC# 2.0で作りこむことにはなるのですが、ロボットのコントロール部分に関しては、直感的に記述できるドメイン特化言語 (DSL / Domain Specific Language) を構築します。
さて、今年の知能ロボコン参加ロボットですが、
ガワ
ガワ(外見)の部分はいたって標準的に作りこみます。目新しいものは盛り込まず、確実に動き、故障時の対応が容易になることを最重要課題とします。モータについては7.2VのDCモータを利用します。
回路
回路部分は、5年前に作ったまじょこさんの技術をベースにモジュール化を推し進めていきます。
ソフトウェア
ソフトウェア部分が今回の一番の目玉です。ベースとなる部分はアセンブラやCやC# 2.0で作りこむことにはなるのですが、ロボットのコントロール部分に関しては、直感的に記述できるドメイン特化言語 (DSL / Domain Specific Language) を構築します。

TOP PAGE △