2008年の知能ロボコン
昨年は、ついに自宅の一室に知能ロボコンの競技台を設置(自作)してしまったので、今年は出場したいなぁ。
今年は、2008/6/21・22(土・日)開催の模様です。
* 画像のはちゅねミクとネギはイメージです。でも、知能ロボコンでそろそろAR(拡張現実感)をやってもいいよね。
今年は、2008/6/21・22(土・日)開催の模様です。
* 画像のはちゅねミクとネギはイメージです。でも、知能ロボコンでそろそろAR(拡張現実感)をやってもいいよね。

知能ロボコン番外編
このロボコンを見に行く方は是非予選(土曜日)に行ってみてください。このロボコンでは、開発者の方に直接話を聞けるようになっています。特に、翌日の決勝戦には進めなそうな、アイディア倒れ風のロボットを作っている方のお話を聞くと、いろいろなこだわりが聞けて楽しいです。ただし、大抵の開発者は予選の直前までろくに寝ないで作業をしてきているので、空気は読んでくださいね :-)
以下、会場で拾った小ネタをご紹介。
- 会場内無線LAN
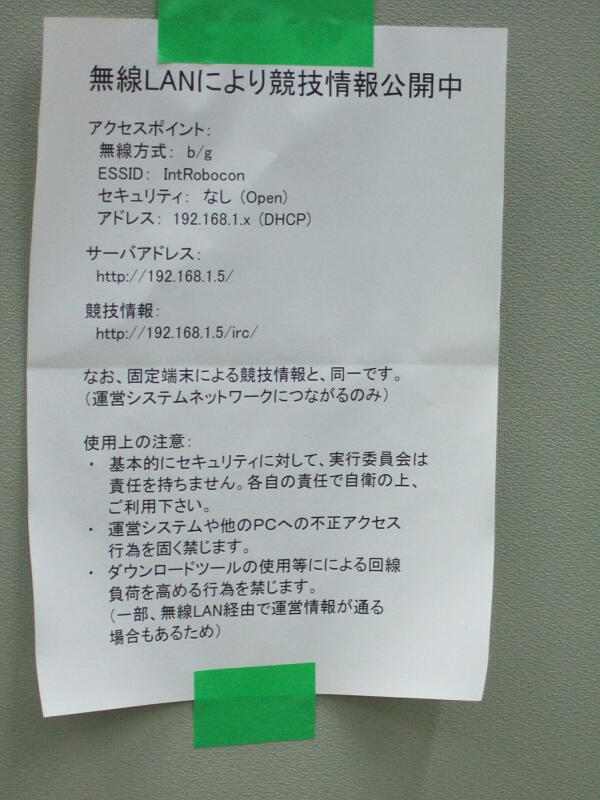
競技結果をリアルタイム配信するため、会場内には無線LANのアクセスポイントが設置されています。一方、無線を利用するロボットにとっては、観客のみなさんが持っている多数の携帯電話でただでさえ電波状況が悪いところに、これでダメ押しされます。こういった外乱に強いロボットが求められるのが、このロボコンの醍醐味です。
- ガンダム関連
バンダイが協賛ということもあり、当日発表されたばかりの新作のガンダムのポスターが配布されていました。また、各賞の副賞にはガンプラも含まれていました。
- 帷子丸
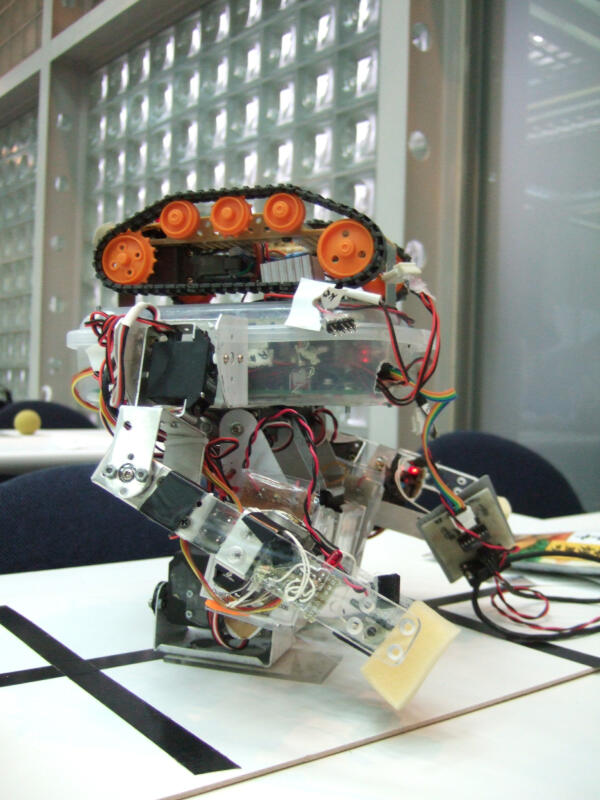
京大機械研OBの山口さんのロボット。無駄に(褒め言葉)変形します。
- 智嚢ロボット 2006
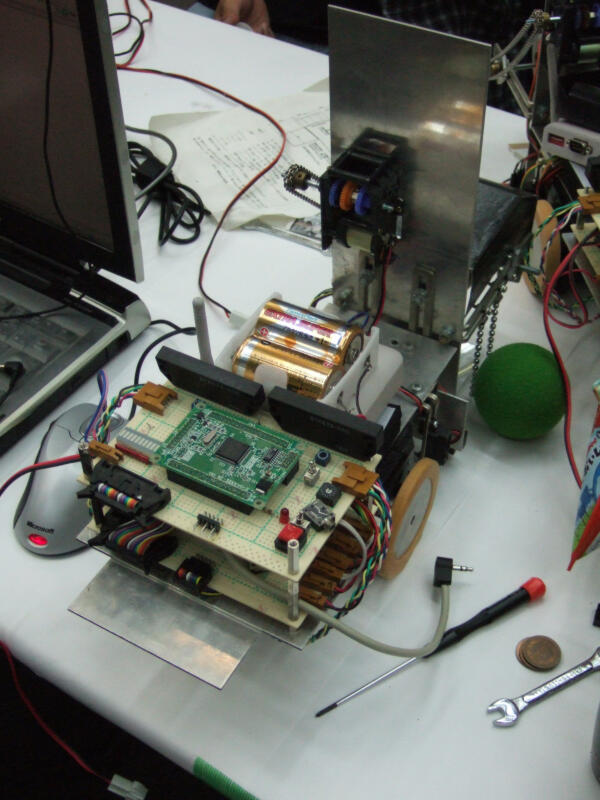
常連の小出さんのロボット。単一電池と車輪をみると、小出さんだ、とわかります。
- NeCoXE-2
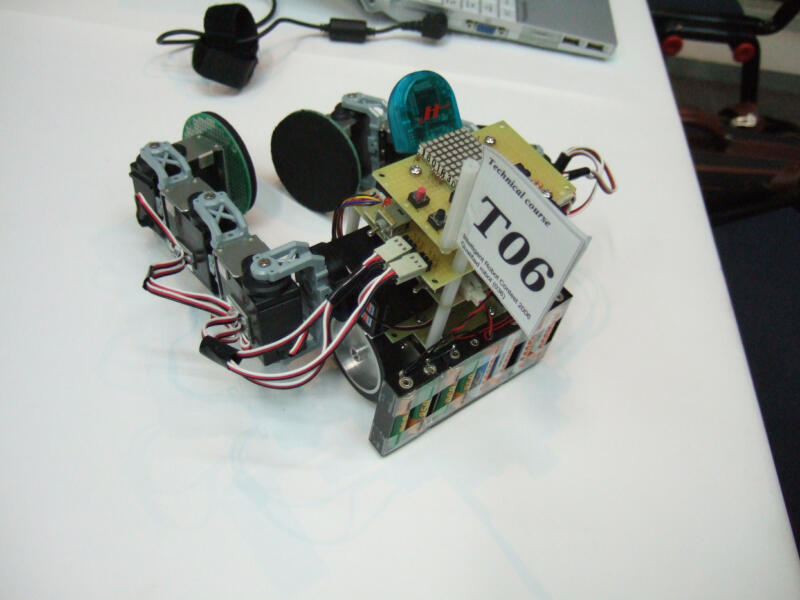
常連のいしかわきょーすけさんのロボット。コンパクトな筐体と単四電池をみると、いしかわさんだ、とわかります。
以下、デモで紹介させていただいたロボットです。デモはかなり好き勝手にやらせていただきました。会場の中には、技術オタクな方々はもちろん、技術はあまり知らなくてもロボットを見に来ている方々も大勢いて、さらにその中にはスポンサーになってくださる方や、将来参加される方もいらっしゃるに違いないので、できるだけ平易に説明するよう心がけましたが、やっぱり技術寄りになってしまいました。すみません>関係者のみなさま
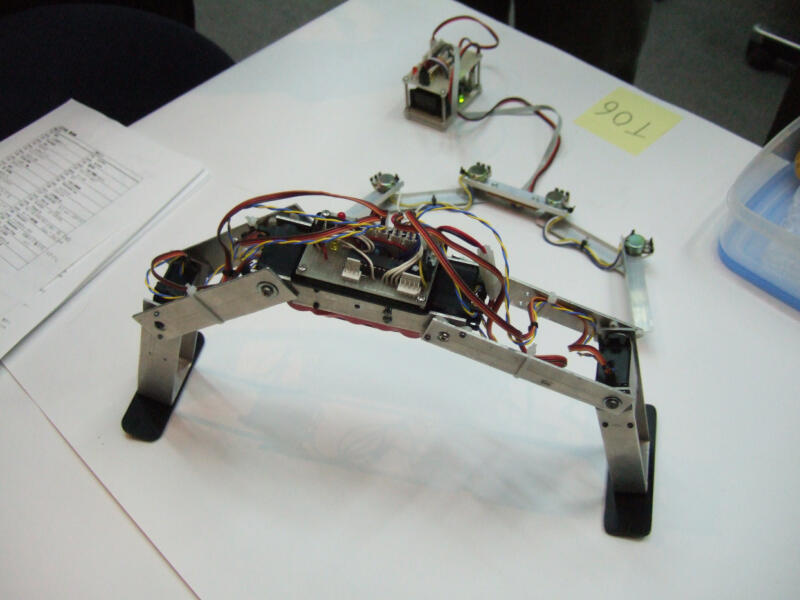
- Lupinus
→ Robot Watch の画像
東北大学工学部自主ゼミナール協議会 TTT チームのロボットです。ロボットの後方が無駄に出っ張っていたり、歩く&車輪で走行するあたりが、タチ○マを意識しているんだろうな~、と思って、デモ後に伺ってみたところ、やはりそのようで(笑
- 違知郎
→ Robot Watch の画像
福島高専分子生物学愛好会 通常の3倍の堀越くまさん のみなさんのロボットです。細かいところまで良くできているなぁ、と感心させられました。個人的には、プログラムの変更をマイコンの差し替えで行っている点が一番ツボにはまりました。やはり頭脳部分は物理的に差し替えるのがカッコ良いです。
このサイズのロボットを遠方から持ち運ぶのはなかなか大変なのですが、このチームでは持ち運びに、登山用の道具を利用しているとのことでした。

- 飛び入り参加のロボット(?)
お名前等失念しました。申し訳ありません。
これは動きが秀逸でした。マスタ-スレーブの通信には赤外線を利用していました。何気なくいろいろデモをされていましたが、かなり作りこんでいる印象を受けました。是非来年は知能ロボコン向けのロボットを出していただきたいなと思いました。
以下、会場で拾った小ネタをご紹介。
- 会場内無線LAN
競技結果をリアルタイム配信するため、会場内には無線LANのアクセスポイントが設置されています。一方、無線を利用するロボットにとっては、観客のみなさんが持っている多数の携帯電話でただでさえ電波状況が悪いところに、これでダメ押しされます。こういった外乱に強いロボットが求められるのが、このロボコンの醍醐味です。
- ガンダム関連
バンダイが協賛ということもあり、当日発表されたばかりの新作のガンダムのポスターが配布されていました。また、各賞の副賞にはガンプラも含まれていました。
- 帷子丸
京大機械研OBの山口さんのロボット。無駄に(褒め言葉)変形します。
- 智嚢ロボット 2006
常連の小出さんのロボット。単一電池と車輪をみると、小出さんだ、とわかります。
- NeCoXE-2
常連のいしかわきょーすけさんのロボット。コンパクトな筐体と単四電池をみると、いしかわさんだ、とわかります。
以下、デモで紹介させていただいたロボットです。デモはかなり好き勝手にやらせていただきました。会場の中には、技術オタクな方々はもちろん、技術はあまり知らなくてもロボットを見に来ている方々も大勢いて、さらにその中にはスポンサーになってくださる方や、将来参加される方もいらっしゃるに違いないので、できるだけ平易に説明するよう心がけましたが、やっぱり技術寄りになってしまいました。すみません>関係者のみなさま
- Lupinus
→ Robot Watch の画像
東北大学工学部自主ゼミナール協議会 TTT チームのロボットです。ロボットの後方が無駄に出っ張っていたり、歩く&車輪で走行するあたりが、タチ○マを意識しているんだろうな~、と思って、デモ後に伺ってみたところ、やはりそのようで(笑
- 違知郎
→ Robot Watch の画像
福島高専分子生物学愛好会 通常の3倍の堀越くまさん のみなさんのロボットです。細かいところまで良くできているなぁ、と感心させられました。個人的には、プログラムの変更をマイコンの差し替えで行っている点が一番ツボにはまりました。やはり頭脳部分は物理的に差し替えるのがカッコ良いです。
このサイズのロボットを遠方から持ち運ぶのはなかなか大変なのですが、このチームでは持ち運びに、登山用の道具を利用しているとのことでした。
- 飛び入り参加のロボット(?)
お名前等失念しました。申し訳ありません。
これは動きが秀逸でした。マスタ-スレーブの通信には赤外線を利用していました。何気なくいろいろデモをされていましたが、かなり作りこんでいる印象を受けました。是非来年は知能ロボコン向けのロボットを出していただきたいなと思いました。

知能ロボコンまとめ

baby touch 氏による、よくぞここまで書いてくれた、という、かゆいところに手が届くような知能ロボコンレポートに触発されて知能ロボコンまとめサイトを妄想中...。
まずは、リンクから。技術情報なども含めて知能ロボコンまとめWikiも作りたいところ。
それぞれのサイトには検索サイトを利用するだけではなかなか見つからないノウハウが詰まっています。リンクは順不同です。競技参加ロボットに関する情報を公開しているサイトがありましたら教えてください。
- 知能ロボットコンテストフェスティバル公式サイト
- ロボット開発工学 (東北学院大学 工学部 機械知能工学科 熊谷研究室)
- メカトロニクス研究部会-みんなの日記- (宮城高専メカトロニクス研究部会)
- 東北大学工学部自主ゼミナール協議会
- 2006年製作日誌 (山形電波工高csc)
- 東京農工大学ロボット研究会RUR
- 名古屋工業大学ロボコン工房
- 京大機械研究会
- 陰気な男でいいですか? (いしかわきょーすけのほーむぺーじ)
- 一ヶ月半、死に物狂いで作って知能ロボコンに参加したページ
- もやねのロボット三昧 (もやねのアトリエ)
- HiKiKoMoRi がゆく: InRoF2006 アーカイブ (HiKiKoMoRi がゆく)
- おいふぉりーのぶろぐ (おいふぉりーのほーむぺーじ)
審査員
- バンダイロボット研究所
- 未来ロボット技術研究センター
- AAF ぱ研

「まちみのな」(ハードウェア編)
(現在書きかけです)
知能ロボットコンテストフェスティバル2006に出場したロボット「まちみのな」の説明です。
- 全体写真
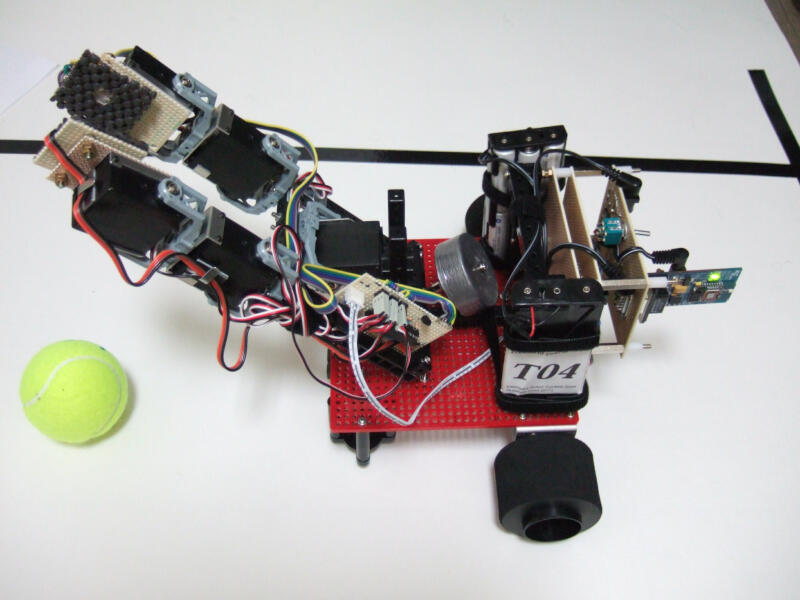
ロボットの腕が大部分を占めています。
- 横から
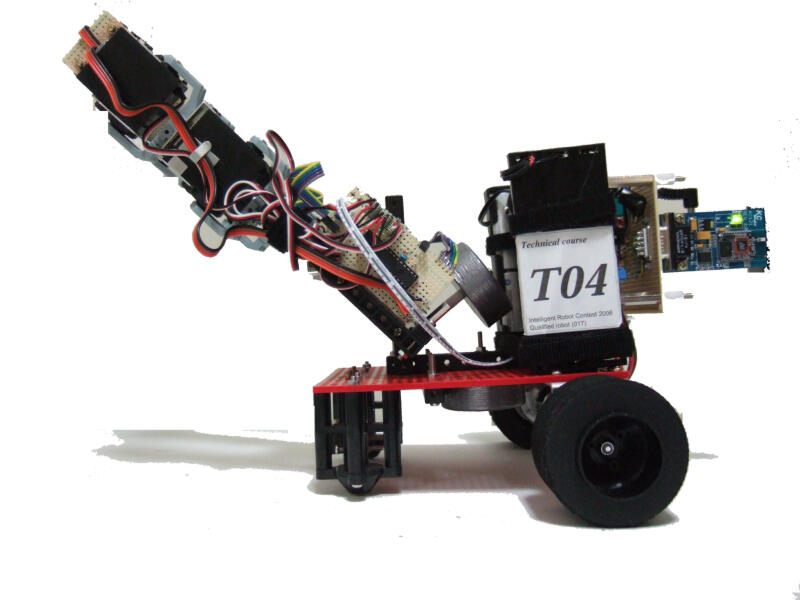
腕とロボット本体の2箇所におもりをつけることで全体の重量バランスをとっています。腕はシーソーのようにつりあいが取れており、ものを持ち上げる場合でも少ない力で動作させることができます。また、右側に飛び出している緑色のものはBluetoothの通信モジュールです。ここからパソコンと通信します。
- 前から
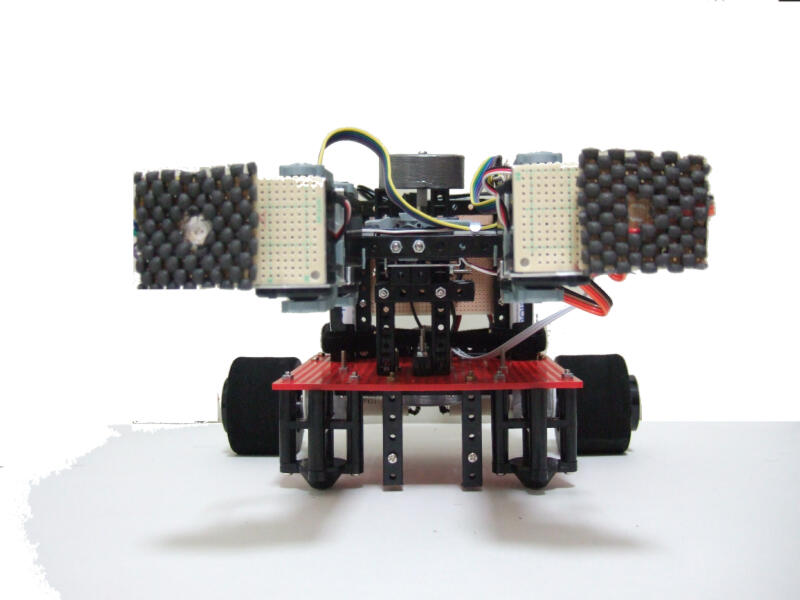
手のひらの部分の黒いものは滑り止めです。また手のひらの中央部分にはLEDライト(右手)と光センサ(左手)がついています。これで物が取れる位置にあるかどうかを調べます。
- 手の部分
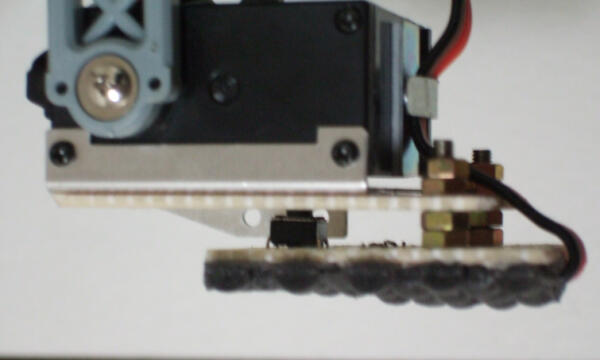
手の部分にはマイクロスイッチを配置し、物を握ったことが検出できるようになっています。
知能ロボットコンテストフェスティバル2006に出場したロボット「まちみのな」の説明です。
- 全体写真
ロボットの腕が大部分を占めています。
- 横から
腕とロボット本体の2箇所におもりをつけることで全体の重量バランスをとっています。腕はシーソーのようにつりあいが取れており、ものを持ち上げる場合でも少ない力で動作させることができます。また、右側に飛び出している緑色のものはBluetoothの通信モジュールです。ここからパソコンと通信します。
- 前から
手のひらの部分の黒いものは滑り止めです。また手のひらの中央部分にはLEDライト(右手)と光センサ(左手)がついています。これで物が取れる位置にあるかどうかを調べます。
- 手の部分
手の部分にはマイクロスイッチを配置し、物を握ったことが検出できるようになっています。

撮影会@仙台市科学館

本番まであと1週間となりました。やはりフル規格の競技台で試しておいたほうが良いだろう、ということで土・日きっぷを使ってロボコンの会場の仙台市科学館に行ってきました。

本番の会場は、さすがにまだ準備は行われていませんでしたが、試走台はすでに置かれていましたので、100MB超のデータを収集してきました。
画像処理で課題となりそうなのは次の点です。
more ...

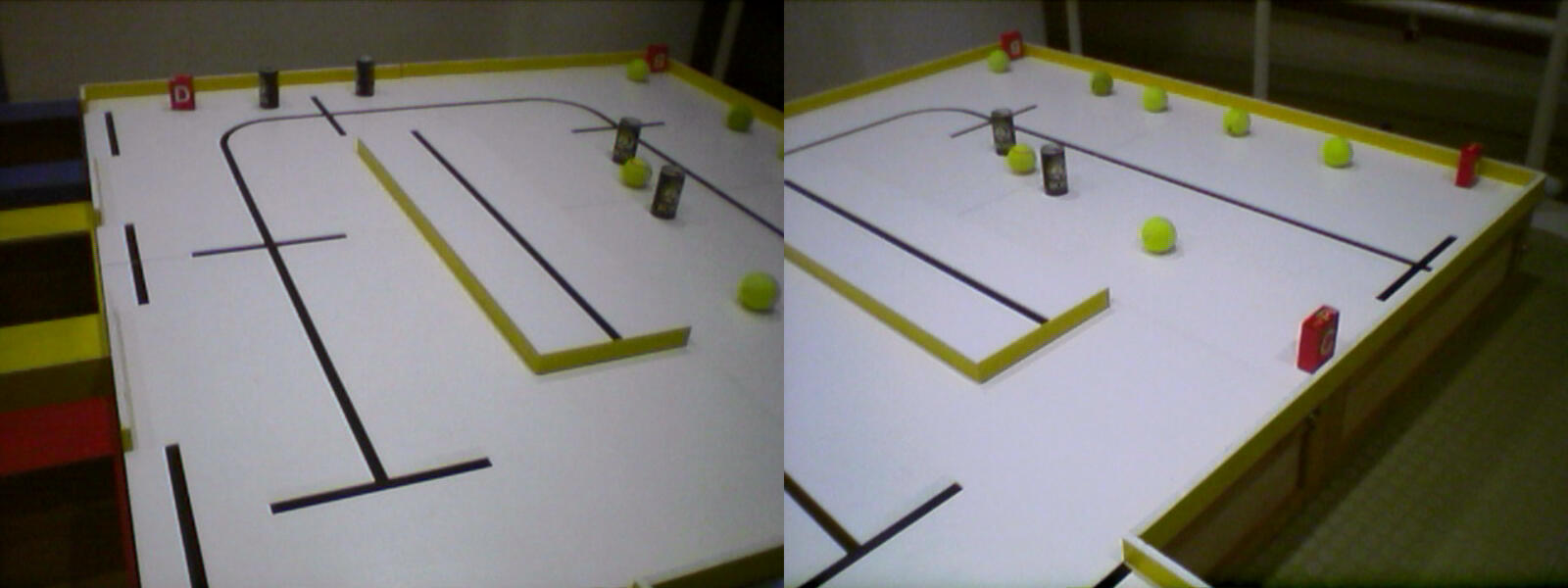
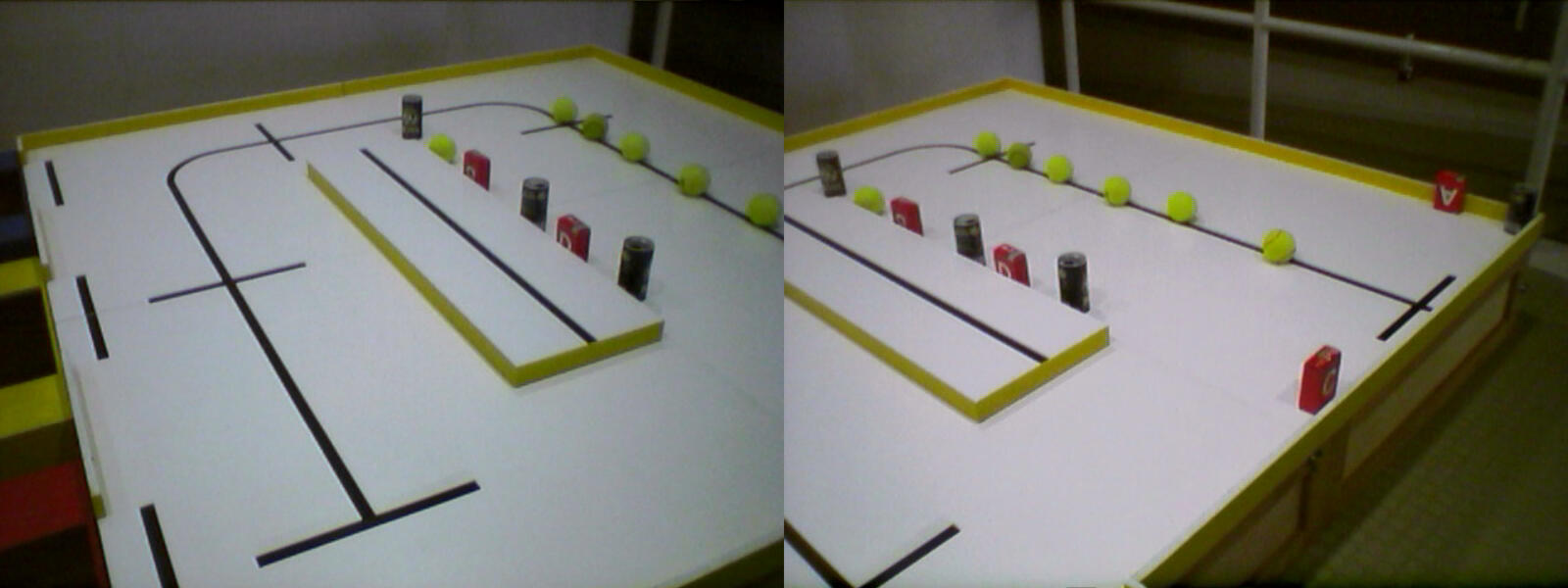
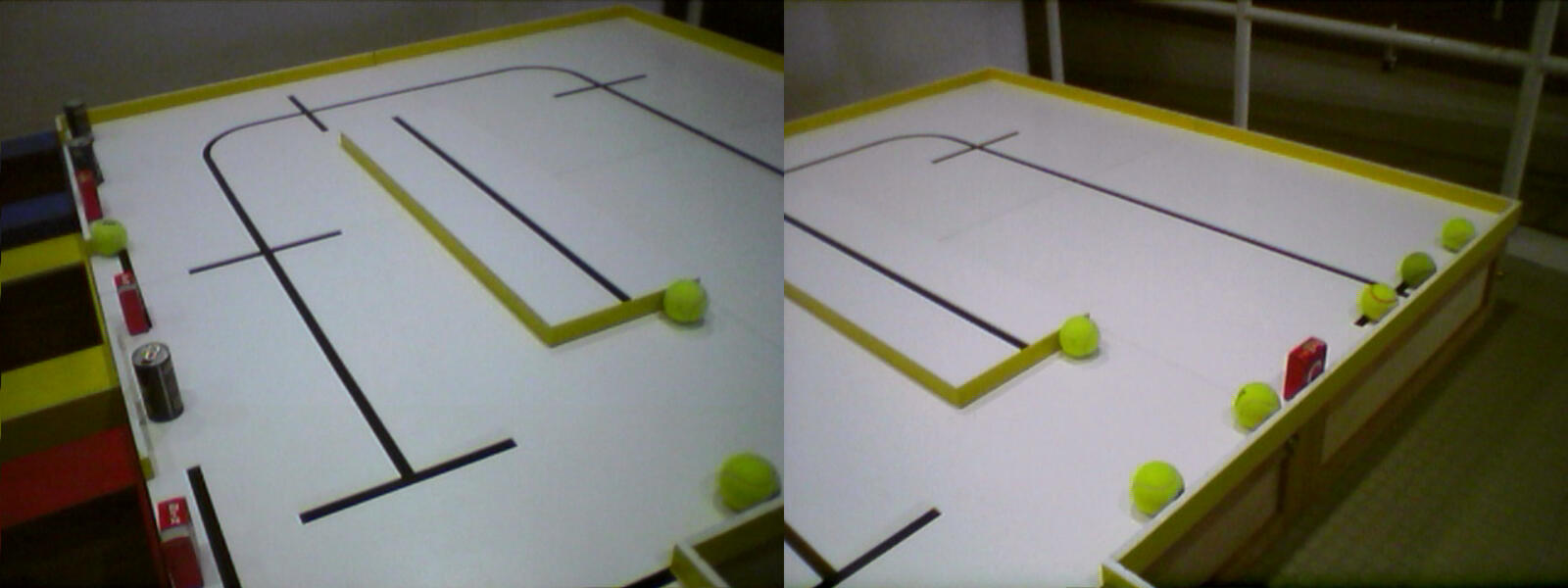
My競技台設置
部屋のスペースの都合で半分だけですが....。
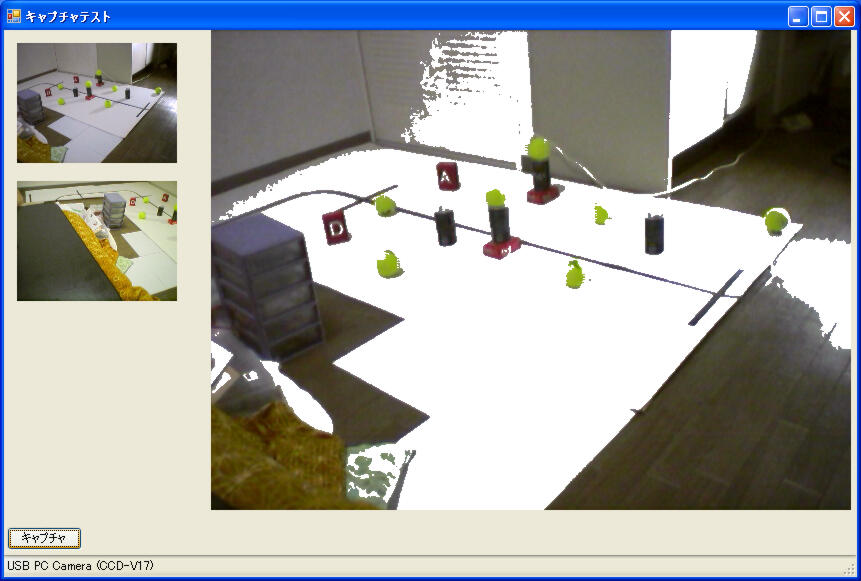
カメラはスタート地点・高さ850mmの位置に2台設置しており、競技台のほぼ全体が一度に見渡せます。
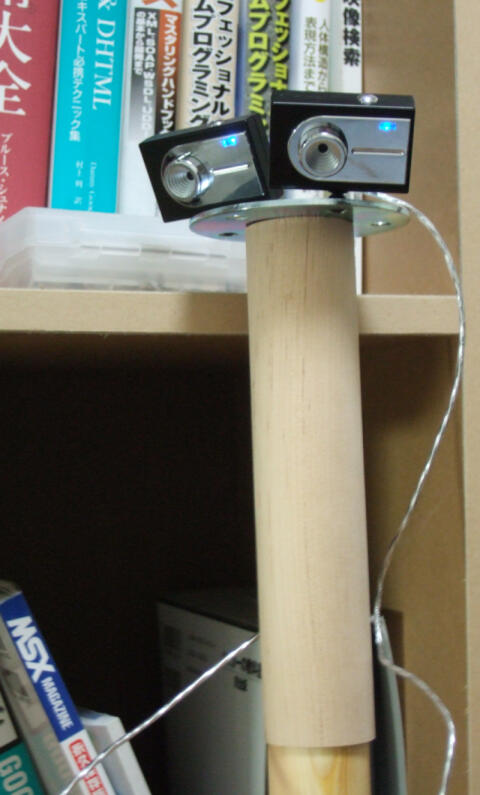
カメラの実物はコレの色違いです。台座の部分は引っ張ると簡単に取り外せるようになっています。
ロボットの位置&方向もこれでトレース可能です。ただ、この位置からの撮影では精度に不安があるので、補助的にのみ利用予定です。
競技台は実際には木製+白ペンキ塗装です。ただ、実物と同じものを作るのは手間なのと、保管場所に困るので、今回は、カーペットの裏で代用しています。色合いや手触り感が実物と近いものを探してきました。
指定された缶が無かったので、似たような感じのものを探してきました。ダイエーのセービングブランドのやつです。
これまた指定されたものが無かったので、近そうなものを数種類買ってきました。
これはさすがに売っていましたので、実物と同じものです。石鹸箱の周りに、公式サイトのルールブックに掲載されている石鹸箱の参考資料の図案を原寸大で打ち出して貼り付けています。色合いは赤というよりは、ややワインレッドに近い感じです。

PIC16F88のシリアル通信機能
PIC16F84の機能アップ版、PIC16F88のデータシートを読んでいたら、セラロック等の外付けオシレータなしでも 38400 bps でシリアル通信できそうな記述がありました。
内蔵オシレータ(8MHz)なんて信用できるのかなぁ、と思っていたのですが、工場出荷時に調整してある上、OSCTUNEレジスタを変更することで±12.5%の範囲で実行時にも調整可能のようです。
 よく考えたら、内蔵オシレータを微調整することで、115kbps ~ 460kbps もいけそうです(2006/5/14追記)。
よく考えたら、内蔵オシレータを微調整することで、115kbps ~ 460kbps もいけそうです(2006/5/14追記)。
 まちみのな: PIC16F88の内蔵クロックを利用する
まちみのな: PIC16F88の内蔵クロックを利用する
今回のロボットの内部シリアルバスでは、115200 bps (9.22MHzのセラロックを外付け) にしようかと思っていたのですが、まじょこさんのシリアルバスも今月のインターフェースのSH-2基板も通信速度は 38400 bps なので、38400 bps にすることにしました。
 関連リンク
関連リンク
Microchip: PIC16F88
秋月電子通商: セラミック発振子(セラロック)コンデンサ内蔵タイプ 9.22MHz
CQ出版: インターフェース 2006年6月号 SH-2基板ではじめる組み込みマイコン入門
Junkbox: ろぼっと☆まじょこさん シリアルバス仕様
内蔵オシレータ(8MHz)なんて信用できるのかなぁ、と思っていたのですが、工場出荷時に調整してある上、OSCTUNEレジスタを変更することで±12.5%の範囲で実行時にも調整可能のようです。
今回のロボットの内部シリアルバスでは、115200 bps (9.22MHzのセラロックを外付け) にしようかと思っていたのですが、まじょこさんのシリアルバスも今月のインターフェースのSH-2基板も通信速度は 38400 bps なので、38400 bps にすることにしました。
Microchip: PIC16F88
秋月電子通商: セラミック発振子(セラロック)コンデンサ内蔵タイプ 9.22MHz
CQ出版: インターフェース 2006年6月号 SH-2基板ではじめる組み込みマイコン入門
Junkbox: ろぼっと☆まじょこさん シリアルバス仕様

この記事のトラックバックURL
http://tmp.junkbox.info/tb.php/15
新着トラックバック
[http://tmp.junkbox.info/c1-4.html まちみのな]
去年、一昨年は出場されていないかと。
トラックバック先を見る限りでは、今年は出場されるのでしょうか?
1999年にはセガサタ�
去年、一昨年は出場されていないかと。
トラックバック先を見る限りでは、今年は出場されるのでしょうか?
1999年にはセガサタ�
| 一ヶ月半、死に物狂いで作って知能ロボコンに参加するページ | 06/05/22 04:59 |
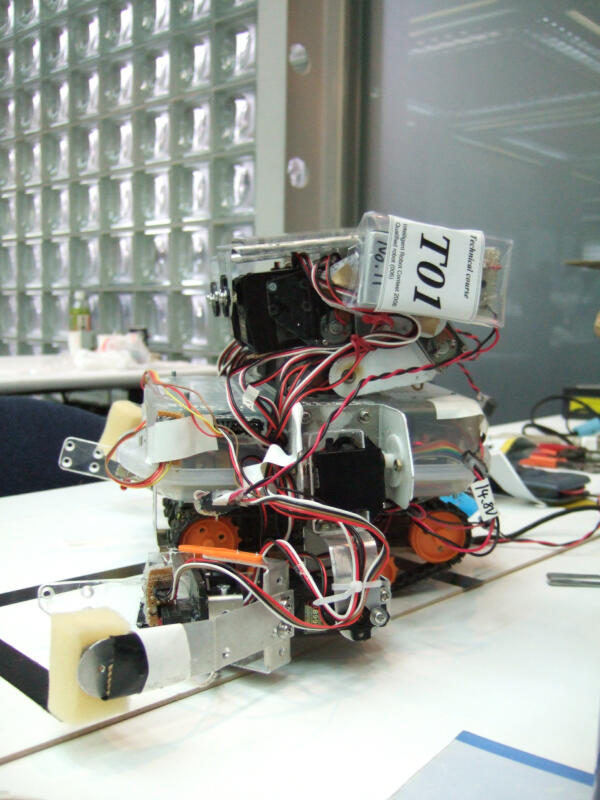
足回り
ロボットの移動に関しては、上位のレイヤからは移動量と移動速度だけしか見えなくするので、2足歩行でもキャタピラでもなんでも良いのですが、部品の入手性、動作の安定性などを考慮してこのような形にしました。床面から少し距離を置くことで、多少でこぼこした場所でも床をこすらずスムーズに移動できます。
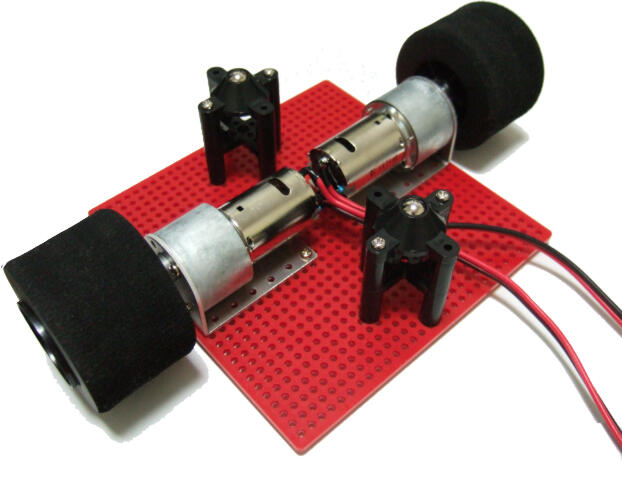
(床面側から撮影)
使用部品は以下の通り。
ユニバーサルプレート RDP-801 (赤いプレート) (ツクモロボット王国)
ユニバーサルキャスター RDP-806 (ツクモロボット王国)
ギヤードモーター380K75&64mmスポンジタイヤ(2セット) (ツクモロボット王国)
モータで駆動する車輪が2個あるとき、キャスター等を利用してロボットを支えることで超信地旋回(車輪をお互いに逆方向に動かし、その場で向きを変えること)のような動作が取れるようになります。そこで、自律ロボットでは家具用のキャスターやカグスベール(ニチアス株式会社)を利用することが多いのですが、今回利用したキャスターはロボット専用ということもあり家具用のものと比べて良い動きをします。スペーサーが数種類ついているのもよいです。
(床面側から撮影)
使用部品は以下の通り。
モータで駆動する車輪が2個あるとき、キャスター等を利用してロボットを支えることで超信地旋回(車輪をお互いに逆方向に動かし、その場で向きを変えること)のような動作が取れるようになります。そこで、自律ロボットでは家具用のキャスターやカグスベール(

TOP PAGE △