「まちみのな」(ハードウェア編)
(現在書きかけです)
知能ロボットコンテストフェスティバル2006に出場したロボット「まちみのな」の説明です。
- 全体写真
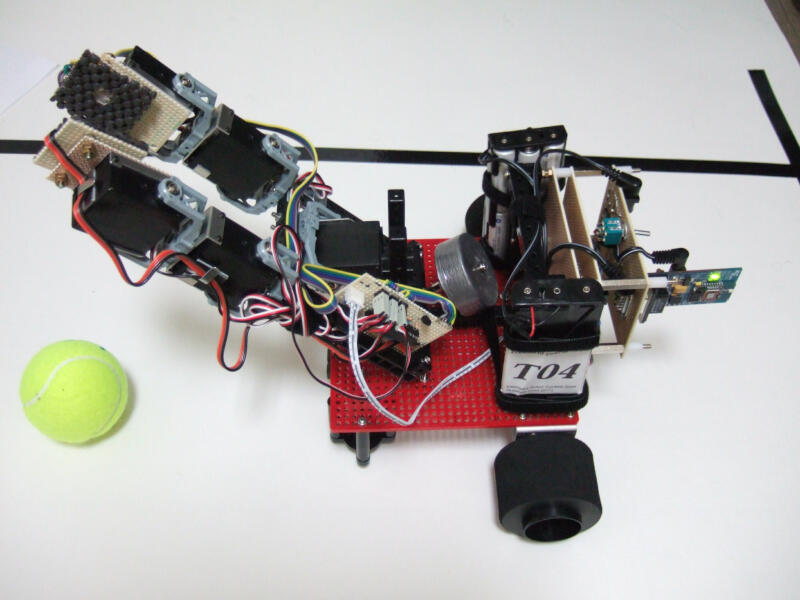
ロボットの腕が大部分を占めています。
- 横から
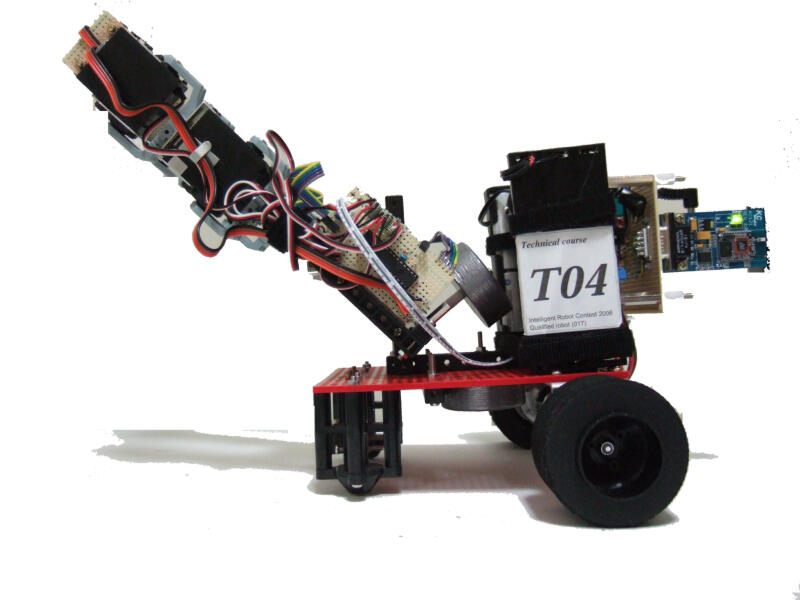
腕とロボット本体の2箇所におもりをつけることで全体の重量バランスをとっています。腕はシーソーのようにつりあいが取れており、ものを持ち上げる場合でも少ない力で動作させることができます。また、右側に飛び出している緑色のものはBluetoothの通信モジュールです。ここからパソコンと通信します。
- 前から
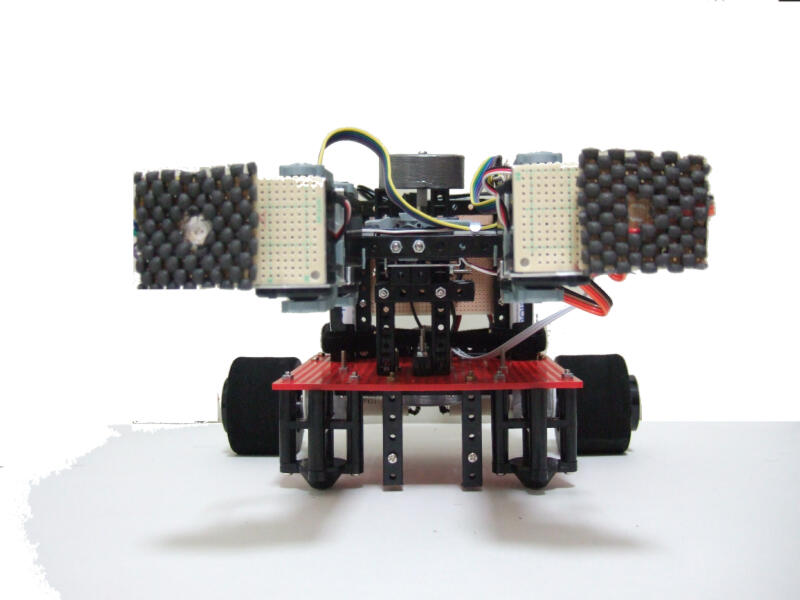
手のひらの部分の黒いものは滑り止めです。また手のひらの中央部分にはLEDライト(右手)と光センサ(左手)がついています。これで物が取れる位置にあるかどうかを調べます。
- 手の部分
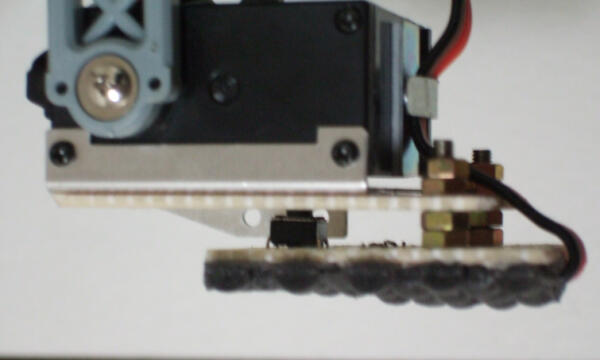
手の部分にはマイクロスイッチを配置し、物を握ったことが検出できるようになっています。
知能ロボットコンテストフェスティバル2006に出場したロボット「まちみのな」の説明です。
- 全体写真
ロボットの腕が大部分を占めています。
- 横から
腕とロボット本体の2箇所におもりをつけることで全体の重量バランスをとっています。腕はシーソーのようにつりあいが取れており、ものを持ち上げる場合でも少ない力で動作させることができます。また、右側に飛び出している緑色のものはBluetoothの通信モジュールです。ここからパソコンと通信します。
- 前から
手のひらの部分の黒いものは滑り止めです。また手のひらの中央部分にはLEDライト(右手)と光センサ(左手)がついています。これで物が取れる位置にあるかどうかを調べます。
- 手の部分
手の部分にはマイクロスイッチを配置し、物を握ったことが検出できるようになっています。

コメント
コメントする
この記事のトラックバックURL
http://tmp.junkbox.info/tb.php/27
トラックバック
TOP PAGE △